

گیرنده مولتی فرکانس شمیم: به یک دستگاه گیرنده ROVER قابل حمل گفته می شود که تصحیحات سامانه شمیم را دریافت و پردازش می کند. پس از پردازش تصحیحات توسط گیرنده یا GPS اقدام به نقشه برداری و تهیه نقشه یو تی ام جهت تثبیت در نقشه کاداستر می نماییم. گیرنده مولتی فرکانس در واقع تکمیل کننده شبکه یا سامانه شمیم می باشد که ابزاری در دست کاربران سامانه شمیم است.
گیرنده مولتی فرکانس شمیم چیست؟
با بهرهگیری از گیرندههای مولتی فرکانس متصل به سامانه شمیم، امکان نقشهبرداری با دقت بیشتری فراهم شده است. این دقت بالا به تهیه نقشههای دقیق از معابر، خیابانها، جادهها، کوهها، رودخانهها و سایر منابع کمک میکند. در صورتی که این دادهها در سیستم اطلاعات جغرافیایی GIS ذخیره شوند، میتوان از قابلیتهای این سیستم برای انجام تحلیلهای مختلف بهرهمند شد. امروزه استفاده از دستگاه GNSS به همراه سیستم GIS برای بهینهسازی منابع و پیادهسازی سیستمهای پشتیبانی تصمیمگیری بسیار رایج شده است.

سامانه ناوبری جهانی GNSS به عنوان یک ابزار مؤثر، جایگاه ویژهای در علوم مهندسی یافته است. این سیستم قادر است موقعیت و سرعت را با دقت بالا تعیین کند و این امر به طور چشمگیری زمان مورد نیاز برای فعالیتهای نقشهبرداری را کاهش میدهد و در نتیجه بهره وری را افزایش میدهد. در گذشته، برای نقشهبرداری و قراولروی، نیاز بود تا در مکانهای مرتفع مستقر شویم تا بتوانیم نقاط و عوارض را برداشت کنیم. اما با وجود دستگاههای GPS، اکنون میتوان ایستگاهها را در فواصل بیشتری مستقر کرد و دیگر نیازی به نگرانی درباره محدودیتهای خط دید برای قراولروی ایستگاهها نیست. این تغییرات موجب تسهیل و بهبود فرآیندهای نقشهبرداری شده و امکانات جدیدی را در این حوزه فراهم آورده است.
کاربرد گیرنده مولتی فرکانس شمیم
استفاده از گیرندههای مولتیفرکانس شمیم یا جیپیاس متصل به سامانه شمیم در بخشهای نظامی تنها کاربرد این فناوری نیست. یکی از جنبههای مهم غیرنظامی آن، به کارگیری این سیستمها در تعیین جابهجایی شبکههای میکروژئودزی است. در این زمینه، اندازهگیری و تحلیل رفتار سازههای حساس مانند سدها مورد توجه قرار میگیرد. برای سنجش حرکات هر سازه، چندین نقطه پیرامونی و نقطه نشانه بر روی سازه با استفاده از پیلارهای بتنی ایجاد میشود. سپس با انجام اندازهگیریهای دقیق در بازههای زمانی مشخص، تغییرات حرکتی این سازهها ثبت و محاسبه میشود.

گیرندههای مولتیفرکانس شمیم یا دستگاههای GNSS همچنین در نقشهبرداری مناطق ساحلی و آبراهها کاربرد دارند. این فناوری علاوه بر ایجاد نقشههای هیدروگرافی دقیقتر، به دریانوردان این امکان را میدهد که از تغییرات عمق و خطرات ممکن در زیر آب آگاه شوند و در صورت نیاز هشدارهای لازم را دریافت کنند. همچنین، سازندگان پلها و سکوهای نفتی از جیپیاس برای بررسیهای دقیق تغییرات هیدروگرافی استفاده میکنند.
نقشهبرداران میتوانند با حمل گیرنده مولتی فرکانس شمیم GNSS در کولهپشتی یا نصب آن بر روی وسایل نقلیه، فرآیند جمعآوری اطلاعات دقیق و سریع را انجام دهند. برخی از این سیستمها به صورت بیسیم با گیرندههای مرجع در ارتباط هستند تا اطلاعات مورد نیاز برای تصحیح خطا بهطور مداوم ارائه شود. این ارتباط باعث افزایش دقت بهصورت برخط میگردد و سطح بهرهوری تیمهای نقشهبرداری را به شکل قابل توجهی ارتقا میدهد.
فرکانس در گیرنده مولتی فرکانس چیست؟
در زمینه گیرندههای مولتی فرکانس شمیم، موضوع فرکانس و سیگنال اهمیت زیادی دارد و بیشتر جنبههای نظری را شامل میشود. در این مقاله تلاش میشود تا تفاوتهای بین جیپیاسهای یک فرکانسه و مولتی فرکانس بهطور واضح مورد بررسی قرار گیرد. گیرندههای جیپیاس به دو دسته اصلی، یعنی دو فرکانسه و چند فرکانسه تقسیم میشوند. امروزه نامهای متعددی برای این نوع گیرندهها در میان نقشهبرداران شناخته شده است، از جمله جیپیاس ایستگاهی، جیپیاس رورو، جیپیاس شمیم، جیپیاس نقشهبرداری، جیپیاس RTK و…
نکته قابل توجه این است که استفاده از گیرندههای جیپیاس برای فعالیتهای نقشهبرداری به تدریج منسوخ شده و امروزه بیشتر از گیرندههای GNSS استفاده میشود. این تغییر به دلیل پیشرفتهای فناوری و دقت بالاتر این دستگاهها صورت گرفته است. بنابراین، درک صحیح از تفاوتهای بین انواع مختلف گیرندهها و انتخاب مناسب آنها برای پروژههای نقشهبرداری، امری ضروری است.
سیگنال در مولتی فرکانس چیست؟
در دنیای نقشهبرداری، دو واژه “سیگنال” و “فرکانس” معانی خاص و متفاوتی دارند که ممکن است به اشتباه با یکدیگر خلط شوند. سیگنال به اطلاعاتی اطلاق میشود که به نوعی از یک پدیده خاص حکایت دارند و در علم الکترونیک، به جریانهای الکتریکی یا الکترومغناطیسی که اطلاعات را از یک نقطه به نقطه دیگر منتقل میکنند، اشاره دارد.

از سوی دیگر، در زمینه نقشهبرداری، سیگنال به دادههای معتبر و مفیدی اطلاق میشود که توسط کاربر دریافت شده است. در حالی که فرکانس به تعداد امواجی اشاره دارد که در یک بازه زمانی مشخص از یک نقطه عبور میکنند. به طور مثال، اگر یک موج 0.5 ثانیه طول بکشد تا از یک مکان عبور کند، فرکانس آن معادل دو سیکل در ثانیه خواهد بود. به این ترتیب، در علم نقشهبرداری، درک صحیح این دو مفهوم برای تحلیل دادهها و انجام تحقیقات دقیق اهمیت ویژهای دارد.
نحوه عملکرد ماهواره GNSS – GPS
در مجموع، نحوه کارکرد ماهوارههای GPS و GNSS به یکدیگر شباهت زیادی دارد. تفاوت اصلی در جزئیات مربوط به تعریف سیگنالهای ماهواره و فرکانسهای عملیاتی آنها نهفته است. بیشتر سیگنالهای ارسالشده از سوی ماهوارههای GPS و GNSS در باند فرکانسی L قرار دارند. این سیگنالها شامل اطلاعات مربوط به کدهای فاصلهیابی و ناوبری هستند که به کاربران این امکان را میدهند تا زمان ارسال سیگنال از ماهواره به دستگاههای GPS تک فرکانسه یا مولتی فرکانس و همچنین مختصات ماهواره را در هر لحظه زمانی محاسبه کنند.

اجزای کلیدی تشکیلدهنده یک سیگنال شامل موارد زیر است:
– حامل Carrier
– یک سیگنال رادیویی سینوسی که در یک فرکانس خاص عمل میکند.
– کد فاصلهیابی PRN
این اجزا به کاربران کمک میکند تا دقت لازم را در تعیین موقعیت جغرافیایی خود به دست آورند و سیستمهای ناوبری بهینهتری را تجربه کنند. در واقع، این تکنولوژیها با فراهم کردن اطلاعات دقیق، نقش بسزایی در بهبود خدمات ناوبری و موقعیتیابی ایفا میکنند.
اطلاعات ناوبری گیرنده مولتی فرکانس
پیغامهای باینری که توسط ماهوارهها ارسال میشوند، شامل اطلاعاتی حیاتی درباره تقویم ماهوارهها، مانند پارامترهای کپلری، موقعیت و سرعت آنها، و همچنین پارامترهای بایاس ساعت ماهواره هستند. همچنین، آلماناک Almanac که وضعیت سلامت ماهواره را نشان میدهد و دیگر اطلاعات تکمیلی را نیز در بر میگیرد. اگر گیرنده جیپیاس تنها این اطلاعات را از ماهوارهها دریافت کند، به آن جیپیاس تک فرکانس گفته میشود.
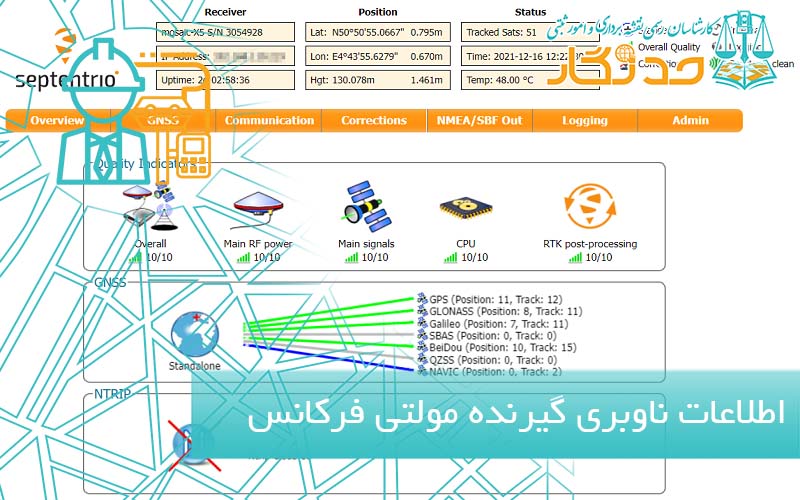
این دنبالههای متشکل از صفر و یک، به گیرنده این امکان را میدهند که زمان ارسال سیگنال از ماهواره به سمت خود را اندازهگیری کند. به این کدها که به صورت تصادفی تولید میشوند، دنبالههای نویز شبرندم PRNگفته میشود که مخفف عبارت Pseudo-Random Noise است. این دنبالهها نقش مهمی در تعیین دقت و قابلیت اطمینان سیستم جیپیاس ایفا میکنند و میتوانند به صورت چند فرکانسه نیز عمل کنند، که این ویژگی به بهبود کیفیت اطلاعات دریافتی کمک میکند.
سامانه ناوبری جهانی GNSS
امروزه سیستم ناوبری جهانی GNSS به عنوان ابزاری موثر در علوم مهندسی شناخته میشود و توانسته است نقش مهمی را در فرآیند تعیین موقعیت دقیق و سرعت عمل نقشهبرداران ایفا کند. این فناوری با افزایش دقت و قابلیت اطمینان، زمان لازم برای انجام کارهای نقشهبرداری را کاهش داده و بهرهوری را به طرز چشمگیری افزایش داده است. مهندسین ژئوماتیک یا نقشه برداری میتوانند گیرندههای GNSS را به راحتی در کولهپشتی خود حمل کرده یا بر روی وسایل نقلیه نصب کنند. این سیستمها به صورت بیسیم با گیرندههای مرجع در ارتباط هستند و اطلاعات تصحیح خطا را به طور مستمر ارائه میدهند.

این قابلیت به بهبود دقت در زمان واقعی کمک کرده و کارایی تیمهای نقشهبرداری را به طرز قابل توجهی افزایش میدهد. گیرندههای مولتیفرکانس GNSS تحولی بزرگ در شناسایی موقعیت عوارض طبیعی و مصنوعی به وجود آوردهاند. با توجه به کارایی و دقت بالای این فناوری، روز به روز شاهد گسترش کاربردهای آن در زمینههای مختلفی چون نقشهبرداری، ژئودزی، تعیین جابجایی و تغییرات زمینشناسی، به همراه ناوبری وسایل نقلیه هوایی، دریایی و زمینی هستیم. این پیشرفتها نشاندهنده اهمیت و ضرورت استفاده از GNSS در زندگی روزمره و پروژههای مختلف است.
سامانه GNSS چیست؟
GNSS یک سیستم چند منظوره است که با ادغام آن با سیستم مختصات و مجموعهای از اطلاعات جغرافیایی، امکان ایجاد نقشههای دقیق فراهم میشود. این سیستم نه تنها به تولید نقشه کمک میکند بلکه کار ناوبری را نیز تسهیل میسازد. به علاوه، GNSS در کنار نقشههای دیجیتال، سیستمهای اطلاعات جغرافیایی و ارتباطات رادیویی، یک سیستم جامع برای فرماندهی و کنترل به وجود میآورد.

نقشهبرداری کنترل ژئودتیکی یکی از فعالیتهای زمانبر و پرهزینه در این حوزه است که با بهرهگیری از GNSS میتوان آن را در زمان کمتری انجام داد. این فرآیند شامل بررسی و تحلیل شبکهها، ترمیم و بهبود شبکههای موجود و همچنین گسترش آنهاست. علاوه بر این، تعیین ارتفاع و ژئویید و ایجاد مجموعهای جدید از نقاط کنترل با دقت مناسب نیز از دیگر کارکردهای GNSS به شمار میآید. به خصوص در شبکههای ژئودتیکی مسطحاتی، استفاده از GNSS به روش ایستای میتواند دقت قابل قبولی را به ارمغان آورد. این روشها به ما این امکان را میدهند که با سرعت بیشتری به نتایج مطلوب دست یابیم و از ظرفیتهای GNSS برای بهبود عملکرد نقشهبرداری بهره ببریم.
تلفیق GNSS و اطلاعات مکانی GIS
تلفیق سیستمهای GNSS و GIS بهطور گستردهای مورد توجه قرار گرفته است، زیرا این دو تکنولوژی بهطور متقابل یکدیگر را تقویت و تکمیل میکنند. با گذر صنعت GIS از مرحله جمعآوری دادهها به سمت نگهداری و مدیریت دادهها، رابطه این دو سیستم بیشتر تقویت خواهد شد. در حالی که GIS در جمعآوری اطلاعات نقش ویژهای ایفا کرده است، در آینده انتظار میرود که این دو فعالیت بهطور همزمان و هماهنگ انجام شود.
شبکه GNSS به متخصصان GIS این امکان را میدهد که دادهها را با دقت و سرعت بیشتری دریافت کنند. ابزار GPS بهعنوان یک پشتیبان قوی برای سیستمهای اطلاعات جغرافیایی عمل میکند و با توجه به دقتهای مورد نیاز، اطلاعات مداومی از موقعیت نقاط در مقیاسهای مختلف فراهم میآورد. این ارتباط نزدیک بین GNSS و GIS میتواند به بهبود کیفیت و کارایی دادهها منجر شود و در نتیجه به تصمیمگیریهای بهتر در حوزههای مختلف کمک کند.
مزایای گیرنده مولتی فرکانس شمیم
مزایای گیرنده مولتی فرکانس شمیم به وضوح نمایان است. این دستگاه به طور قابل توجهی در زمان تعیین موقعیت ایستگاهها صرفهجویی میکند و قادر است در هر شرایط جوی، چه در روز و چه در شب، به کار خود ادامه دهد. یکی از ویژگیهای بارز آن، توانایی برقراری ارتباط همزمان با چندین ماهواره است که امکان تعیین موقعیت دقیق و آنی را با دقت بسیار بالا فراهم میآورد. با توجه به این قابلیتها، برتری سیستم GNSS نسبت به روشهای زمینی در فواصل کوتاه و بلند به وضوح مشهود است. پیشنهاد می شود جهت کسب اطلاعات بیشتر مقاله خرید گیرنده مولتی فرکانس شمیم را مطالعه کنید.

این سیستم کاربردهای متعددی دارد که میتوان به موارد زیر اشاره کرد: نقشهبرداری کنترل ژئودتیکی، ادغام با سیستمهای اطلاعات جغرافیایی، نقشهبرداری املاک و کاداستر، مسائل ژئودینامیک، مسائل مهندسی و کنترل دقیق، ناوبری دقیق در خشکی و ژئودزی، فتوگرامتری و سنجش از دور، استفاده از GPS در استخراج معادن و ناوبری. این تنوع کاربردها نشاندهنده قابلیتهای گسترده این فناوری در حوزههای مختلف است.
کاربرد گیرنده مولتی فرکانس در مهندسی
کاربردهای مهندسی و کنترل دقیق به عنوان یکی از ابزارهای حیاتی در مهندسی نقشه برداری شناخته میشود. به دلیل فاصلههای کوتاه بین نقاط در این زمینه، استفاده از روشهای معمول GNSS میتواند دقتی در حد میلیمتر را فراهم آورد. برخی از کاربردهای این فناوری در مهندسی و نقشهبرداری به شرح زیر است. تعیین نقاط کنترل ژئودینامیکی برای مقاصد مختلفی از جمله کارتوگرافی، فتوگرمتری، مطالعات ژئوفیزیکی و تعیین موقعیت در هیدروگرافی. همچنین، کنترل مداوم حرکات هدف مورد نظر با اندازهگیریهای مستمر در زمینههای زیر انجام میشود.

– بررسی نشست زمین در مناطق معدنی یا محلهای استخراج آبهای زیرزمینی
– پایش ریزش دیوارهها و رانش کوهها
– نظارت بر ساخت سدها و بررسی بستر آنها
– کنترل نشست سازههایی نظیر پلها و سدها
– بررسی نشانههای نشست در ساختمانها
علاوه بر این، پیادهسازی شبکههای محلی برای کنترل پروژههای مهندسی شامل موارد زیر است:
– خطدهی و پیادهسازی دستگاههای حفاری در تونلها
– ایجاد شبکههای ساخت پل و سد
– راهسازی و ساخت بزرگراهها
– طراحی و ساخت آبراهها
این قابلیتها نشاندهنده اهمیت و گستره کاربرد مهندسی و کنترل دقیق در پروژههای زیرساختی و مطالعاتی است که نیاز به دقت و کارایی بالا دارند.
کاربرد گیرنده مولتی فرکانس در هیدروگرافی
کاربرد هیدروگرافی با استفاده از فناوری GNSS توسط گیرنده های مولتی فرکانس متصل به سامانه شمیم به دلیل قابلیت تعیین موقعیت آنی و پیوسته با دقت بسیار بالا، در حال گسترش و توسعه سریع است. امروزه برای ردیابی موقعیت قایقها که به طور لحظهای عمق آب را از عمقیاب دریافت میکنند، از سیستم GPS بهرهبرداری میشود.

این کاربردها بر اساس دقت مورد نیاز، به سه دسته اصلی تقسیم میشوند:
– ناوبری دقیق در آبهای ساحلی
– تعیین موقعیت کشتیها
– اندازهگیری موقعیت و سرعت در مقیاسهای کوچک
در دقت متوسط که حدود 1 تا 11 متر است و با سرعت 11 متر در ثانیه انجام میشود، میتوان به موارد زیر اشاره کرد:
– تهیه نقشههای قعر دریا برای مقاصد علمی
– کالیبراسیون سیستمهای ترانسپورندر (دستگاههای کوهیاب دریایی)
– تعیین موقعیت سنجشگرها و انجام نمونهبرداری از زیر زمین به منظور جستجوی منابع معدنی
– تسهیل پهلوگیری کشتیها در اسکلهها
در دقت بالا که کمتر از 11 متر در موقعیتهای مختصاتی و ارتفاعی با همان سرعت 11 متر در ثانیه محقق میشود، موارد زیر قابل توجه است:
– هیدروگرافی دقیق برای کنترل حجم رسوبات در پشت سدها و فرسایش در رودخانهها و اسکلهها
– راهنمایی و کنترل فوری دستگاههای استخراج شن و ماسه
– ارائه پشتیبانی مهندسی در سواحل
– کنترل مداوم و دقیق ارتفاع و وضعیت شناورها و اسکلهها
این دقتها و کاربردهای متنوع، اهمیت استفاده از فناوری GNSS را در هیدروگرافی روزافزون کرده و به بهبود عملکرد در این حوزه کمک شایانی میکند.
کاربرد گیرنده مولتی فرکانس در فتوگرامتری
استفاده از گیرنده مولتی فرکانس شمیم در فتوگرامتری، در مواردی که نیاز به تعیین موقعیتهای زمینی وجود دارد، به کاهش زمان و هزینهها کمک شایانی میکند. این موارد شامل:
اولاً، تعیین مختصات دقیق نقاط کنترل زمینی است. این کار معمولاً از طریق روشهای متداول GPS انجام میگیرد و با توجه به دقت مورد نیاز در تعیین مختصات، از گیرندههای مختلف و روشهای بهینه استفاده میشود.

ثانیاً، در راستای هدایت و ناوبری هواپیماهای فتوگرامتری (نقشهبرداری هوایی)، اغلب از روشهای تفاضلی و ارتباطات رادیویی بهرهبرداری میشود. این روشها امکان کنترل دقیق بر پرواز و جمعآوری دادههای مورد نیاز را فراهم میآورند.
ثالثاً، تعیین مختصات و توجیه صفحه استقرار سنجشگر نیز از اهمیت بالایی برخوردار است. این مورد به ویژه در زمینه مثلثبندی هوایی، به عنوان یک مرحله خاص از تعیین موقعیت دوربین، جایگاه ویژهای دارد و به بهبود دقت و کیفیت دادههای گردآوری شده کمک میکند.
کاربرد گیرنده مولتی فرکانس در معدن
شرکت زغال سنگ آمریکای شمالی در تلاشهای خود برای کاهش هزینههای عملیاتی سالانه در معادن جنوب تگزاس به استفاده از یک سیستم نوین کنترل ماشین با فناوری GNSS متکی است. این سیستم که بر پایه کنترل ماهوارهای وسایل نقلیه طراحی شده، به رانندگان بلدوزر این امکان را میدهد که بدون نیاز به تجهیزات نقشهبرداری، ماشین و تیغه آن را بهطور دقیق کنترل کنند.

با استفاده از سیگنالهای GNSS ارسال شده از ماهوارهها، سیستم تعیین موقعیت GNSS میتواند با دقتی در حد سانتیمتر، موقعیت دقیق وسایل نقلیه و تیغههای آنها را نسبت به طراحی اولیه مشخص کند. این ویژگی به مقایسه وضعیت فعلی با طراحی اصلی کمک میکند و به این ترتیب، دستیابی به وضعیت بهینه برای خاکبرداری یا خاکریزی به سادگی امکانپذیر میگردد. رانندگان میتوانند با هدایت دقیق وسیله نقلیه و تیغه آن در جهتهای مناسب، عملکرد خود را بهبود بخشند و در نهایت هزینهها را کاهش دهند.
کاربرد گیرنده مولتی فرکانس در کاداستر
تعریف کاداستر از دیدگاه فدراسیون بینالمللی کاداستر FIG به عنوان سیستمی مطرح میشود که وضعیت املاک و مستغلات غیرمنقول در یک منطقه خاص را مشخص میکند. این سیستم تمامی اطلاعات مربوط به اندازهگیری، محدوده زمین و نحوه ثبت ویژگیهای ملک را به دقت معرفی مینماید. در نقشهبرداریهای ثبتی، بهویژه در مناطق شهری و متراکم، نیاز به دقت بالا و سرعت عمل حس میشود. برای بهینهسازی شبکهها، میتوان نقاطی را با فواصل کوتاه (بین 1 تا 11 کیلومتر) اضافه کرد. استفاده از گیرنده های مولتی فرکانس شمیم کمک شایانی در تهیه نقشه های کاداستر می کند.

یکی از چالشهای اصلی در این نوع عملیات، وجود موانعی چون ساختمانها، درختان و پلها است که میتواند بر دریافت سیگنالهای GNSS تاثیر منفی بگذارد. این موانع بیشتر در مناطق شهری و در نقشهبرداریهای مستغلات مشهود است. در چنین شرایطی، باید نقاطی را که امکان تعیین موقعیت با GNSS وجود دارد شناسایی کرد و برای محاسبه موقعیت سایر نقاط از ابزارهایی مانند زاویهیاب و طولیاب معمولی بهره گرفت. نکته مهم در اینجا، تعریف صحیح زاویه قطع Cut off angle گیرنده است تا اثرات خطای چند مسیری به حداقل برسد.
در مواقعی که موانع وجود ندارد، استفاده از روش رو ایست-رو مناسب است و در غیر اینصورت میتوان از روش ایستایی سریع استفاده کرد. در حوزه ژئودینامیک، بررسیهای زیر اهمیت دارد:
– تحلیل حرکات منطقهای پوسته زمین
– کنترل دقیق تغییر شکل و نشست زمین
– تحلیل حرکات قارهای صفحات پوسته و تغییرات آنها در مقیاس زمین.
استفاده از دستگاههای پیشرفته نقشهبرداری مانند سیستمهای GNSS/GPS و توتالاستیشنهای دقیق، موجب برداشت سریع و دقیقی از مشخصات مورد نیاز در امور ثبتی میشود. سپس اطلاعات جمعآوریشده با بهرهگیری از ابزارهای قدرتمند نظیر کنترلرها و نرمافزارهای پیشرفته مورد پردازش قرار میگیرد.
نقشه برداری گیرنده مولتی فرکانس
مهندس نقشه برداری جهت انجام عملیات نقشه برداری توسط گیرنده مولتی فرکانس متصل به سامانه های شمیم، از روش های عملیاتی مختلفی بر مبنای نوع پروژه استفاده می کند.در ادامه مقاله روش های نقشه برداری را تشریح می کنیم. برای تعیین بیس لاینهای بلند در شبکههای ژئودتیک و مطالعات تکتونیک صفحهای، از مشاهدات استاتیک استفاده میشود. این روش در فواصل طولانی دقت بالایی دارد، اما نسبت به دیگر روشها از سرعت کمتری برخوردار است.

در مورد شبکههای کنترل محلی، به جای روش استاتیک معمولی، از روش استاتیک سریع یا Rapid Static بهره گرفته میشود. همچنین، برای دستیابی به دقت در طول بازهای حداکثر ۲۰ کیلومتر، این روش نسبت به استاتیک استاندارد دارای مزیتهای بیشتری است. برای برداشت جزئیات و توپوگرافی، روش کینماتیک نیازمند مشاهده چهار ماهواره بهطور واضح توسط گیرنده است. در صورتی که این شرایط مهیا نشود، ممکن است نیاز به حل مجدد ابهام فاز پیش بیاید که این فرایند ممکن است بین ۵ تا ۱۰ دقیقه زمان ببرد، مگر اینکه گیرنده دارای قابلیت پردازش آنی باشد.
روش کینماتیک آنی گیرنده شمیم
روش کینماتیک آنی RTK با برقراری ارتباط رادیویی بین ماهواره، گیرنده مرجع و روور، این امکان را فراهم میآورد که دادهها بهصورت آنی برداشت شوند. این تکنیک به ویژه در شرایطی که ارتباط رادیویی برقرار باشد، به انتقال فوری اطلاعات کمک میکند و میتواند بهطور مؤثری در برداشت جزئیات، پیادهسازی و محاسبات COGO مورد استفاده قرار گیرد. به همین دلیل، RTK به عنوان ابزاری کارآمد در حوزه ژئودزی مدرن شناخته میشود و کاربردهای گستردهای در زمینههای مختلف دارد. این روش به متخصصان این حوزه این امکان را میدهد که با دقت و سرعت بیشتری به جمعآوری دادهها بپردازند و در پروژههای مختلف از آن بهرهمند شوند.
روش استاتیک گیرنده مولتی فرکانس
روش استاتیک STATIC یکی از روشهای کلیدی در نقشهبرداری با استفاده از گیرندههای مولتی فرکانس به شمار میآید. برای اندازهگیری طولهای باز بلند، که معمولاً از ۲۰ کیلومتر (۱۶ مایل) بیشتر است، ابتدا گیرنده GNSS را در یک نقطه مشخص قرار میدهیم. سپس گیرنده روور را در انتهای طول باز دیگر مستقر میسازیم. در این مرحله، باید زمان ذخیرهسازی دادهها را تعیین کنیم که معمولاً بین ۱۵ تا ۶۰ ثانیه تنظیم میشود و باید حداقل یک ساعت برداشت اطلاعات انجام شود. مدت زمان لازم برای برداشت دادهها به عواملی همچون طول بیس لاین، تعداد ماهوارههای در دسترس و هندسه نسبی آنها بستگی دارد. به همین دلیل، ممکن است نیاز به زمان بیشتری برای جمعآوری دادهها داشته باشیم.
برای جلوگیری از بروز خطا، ضروری است که تمامی مراحل را دوباره بررسی کنیم. پس از جمعآوری دادههای کافی، گیرنده روور را خاموش کرده و به بیس لاین بعدی میرویم و این فرایند را برای طول باز جدید دوباره تکرار میکنیم. برای تسریع در مرحله برداشت، میتوانیم از یک گیرنده روور اضافی استفاده کنیم و با جابجایی دو روور، بهطور همزمان بیس لاینها را برداشت کنیم. این کار نه تنها سرعت کار را افزایش میدهد، بلکه دقت اندازهگیریها را نیز بهبود میبخشد. در نهایت، دقت و صحت در این روشها میتواند تأثیر بسزایی بر کیفیت نقشهبرداری داشته باشد.
روش استاتیک سریع گیرنده مولتی فرکانس
در فرآیند استاتیک سریع یا FAST STATIC، ابتدا در پروژههایی که پیشتر برداشت GPS انجام نشده است، لازم است چندین نقطه با مختصات مشخص ایجاد کنیم تا بتوانیم تبدیلها را محاسبه کنیم. یک نقطه به عنوان ایستگاه پایه یا بیس انتخاب میشود. سپس با استفاده از یک یا چند رُووِر، به نقاط معلوم حرکت کرده و به شیوه برداشت استاتیک اقدام میکنیم.
زمان برداشت هر رُووِر به طول بیس لاین و GDOP دقت هندسی وابسته است. پس از جمعآوری دادهها، برای پردازش اطلاعات به دفتر مراجعه میکنیم. برای اطمینان از صحت دادهها، خطاها را با اندازهگیری مجدد همان نقاط در زمانهای مختلف در طول روز بررسی مینماییم. این روش به ما کمک میکند تا دقت برداشتها را افزایش دهیم و به نتایج مطمئنتری دست یابیم.
روش کینماتیک گیرنده مولتی فرکانس
در روش کینماتیک KINIMATIC، ابتدا گیرنده FDS را در محل مناسب مستقر و تنظیم میکنیم. سپس رُووِر را در انتهای طول باز قرار میدهیم و باید توجه داشته باشیم که دستگاهها از موقعیت خود جابهجا نشوند. پس از روشن کردن هر دو گیرنده، باید بین ۵ تا ۲۰ دقیقه صبر کنیم. مدت زمان انتظار به تعداد ماهوارههایی که در میدان دید قرار دارند و طول باز بستگی دارد. پس از جمعآوری دادهها، میتوانیم با رُووِر حرکت کنیم. ثبت نقاط میتواند با نرخ زمانی یا مکانی مشخص و یا هر دو انجام شود. در این روند، مهم است که از نزدیک شدن به موانعی که ممکن است سیگنال گیرنده را مختل کنند، پرهیز کنیم.
زمانی که تعداد ماهوارههای قابل مشاهده توسط گیرنده به کمتر از چهار عدد کاهش یابد، باید گیرنده را به مکانی منتقل کنیم که بتواند چهار ماهواره یا بیشتر را تشخیص دهد. در این وضعیت، قبل از شروع مجدد برداشت، لازم است که ابهام فاز حل شود تا کیفیت دادهها به حداکثر برسد.به این ترتیب، با رعایت این مراحل و نکات، میتوانیم دقت در جمعآوری دادهها را افزایش دهیم و از کیفیت نتایج اطمینان حاصل کنیم.
روش Real-Time Kinematic (RTK)
RTK به عنوان یک روش پیشرفته، جایگزین مشاهدات کینمانیک شده است. گیرنده رُووِر، که به ایستگاه مرجع متصل میشود، علاوه بر دریافت سیگنالها از ایستگاه، به طور مستقیم نیز سیگنالهای ماهوارهای را دریافت میکند. این دو نوع سیگنال در رُووِر پردازش میشوند تا ابهام فاز حل شود. ابتدا با راهاندازی و تنظیمات گیرنده رفرنس شروع میکنیم. به محض اینکه گیرنده رفرنس موفق به دریافت سیگنالهای ماهوارهای شد، میتوانیم رُووِر را روشن کنیم. پس از آن، باید منتظر بمانیم تا رُووِر هر دو نوع سیگنال را دریافت کند. زمانی که این فرایند به پایان میرسد، رُووِر به اصطلاح در حالت اینیشیالایز قرار میگیرد و ابهام فاز برطرف میشود، بنابراین آماده ثبت نقاط و تعیین مختصات خواهد بود.
در این روش، دقت مشاهدات بیس لاین بین ۱ تا ۳ سانتیمتر خواهد بود. ضروری است که ارتباط با ایستگاه مرجع را حفظ کنیم، زیرا قطع این ارتباط میتواند منجر به از دست رفتن دقت و محاسبات مربوط به ابهام فاز رُووِر شود. ما همچنین باید به کنترل رادیو مودم توجه کنیم، زیرا تداخل در امواج رادیویی میتواند در ارسال تصحیحات اختلال ایجاد کند. علاوه بر این، باید اطمینان حاصل کنیم که آنتنها در هر دو حالت ارسال و دریافت تحت تأثیر موانع مانند ساختمانهای بلند قرار نگیرند. انتخاب کابل بلند برای آنتن نیز توصیه نمیشود، چرا که این کار میتواند باعث تضعیف سیگنالها گردد.
سامانه شمیم سازمان ثبت اسناد
سامانه شمیم به عنوان یک شبکه ماهوارهای مبتنی بر گیرندههای روور، به منظور انجام عملیات نقشهبرداری طراحی شده است. این سامانه در راستای اجرای قانون جامع حدنگار کشور و با هدف ایجاد یک شبکه مدیریت یکپارچه مالکیتها توسط سازمان ثبت اسناد و املاک کشور راهاندازی گردیده است. سامانه شمیم قادر است به طور دقیق حدود و ثغور املاک کشور را مشخص کند و در زمینههای مختلف مهندسی و مطالعاتی نیز کاربردهای فراوانی دارد.
دقت تعیین موقعیت در روش RTK به فاصله بین گیرندههای روور و نزدیکترین ایستگاه مرجع وابسته است. در شرایط ایدهآل آسمان باز، دقت تعیین موقعیت با استفاده از سامانه شمیم به 1 سانتیمتر به علاوه 1 قسمت در میلیون میرسد. همچنین، تراکم مناسب ایستگاههای یک شبکه GNSS برای دستیابی به دقت مطلوب در تعیین موقعیت بسیار حائز اهمیت است. معمولاً فاصله بین ایستگاههای مرجع در یک شبکه GNSS ایدهآل حدود 70 کیلومتر تخمین زده میشود. با این حال، سامانه شمیم با وجود تحولی که در سیستم کاداستر کشور ایجاد کرده، در برخی مناطق به دلیل کمبود تراکم ایستگاهها با چالشهایی روبرو است و قادر به ارائه دقت مطلوب 10 سانتیمتر نمیباشد.
سامانه شمیم و اهداف آن
شبکه مدیریت یکپارچه مالکیتها که به اختصار «شمیم» نامیده میشود، در سال 1395 به منظور تحقق اهداف ماده 9 و 10 قانون جامع حدنگار توسط سازمان ثبت اسناد و املاک کشور راهاندازی گردید. این سامانه به عنوان یک شبکه متشکل از ایستگاههای مرجع دائمی GNSS در سطح کشور عمل میکند و به تعیین موقعیت آنی با دقت بالا RTK تحت شبکه کمک مینماید.
هدف اصلی از ایجاد این شبکه، بهبود دقت اطلاعات مکانی مربوط به املاک است. با این حال، کاربردهای متنوعی نیز برای این شبکه وجود دارد که شامل مواردی چون نقشهبرداری پروژههای زیرساختی مانند راهها، سدها و پلها، ناوبری دقیق در سیستمهای حمل و نقل و امداد، و همچنین مطالعات مربوط به تکتونیک و زلزله، فرونشست، مدیریت بحران و تحقیق در زمینههای مختلف جوی و علمی میباشد. شبکه شمیم شامل 144 ایستگاه در نقاط مختلف کشور است که فاصله آنها از یکدیگر بین 60 تا 190 کیلومتر متغیر است.
سامانه شمیم به طور کلی شامل سه بخش اصلی است:
– ایستگاههای مرجع GNSS
– مرکز ارائه خدمات
– بخش پشتیبانی و کاربران
این طراحی جامع، زمینه را برای استفاده گستردهتر و یکپارچهتر از دادههای مکانی فراهم میآورد و به تحقق اهداف ملی در حوزه مدیریت زمین و منابع طبیعی کمک میکند.
مرکز ارائه سرویس و پشتیبانی شمیم
سرور مرکزی سامانه شمیم در این بخش مستقر است. دادههای دریافتی از ایستگاهها از طریق شبکه به این سرور ارسال میشود و پس از پردازش، تصحیحات لازم برای تعیین موقعیت دقیق به گیرندههای Rover متصل به سامانه منتقل میگردد.
علاوه بر این، تیم پشتیبانی مسئولیت نظارت و پشتیبانی از سرور مرکزی و ایستگاههای مرجع را بر عهده دارد. این مسئولیت شامل شناسایی و حل مشکلات سختافزاری و نرمافزاری است که ممکن است پیش بیاید، مانند خرابی گیرندههای مرجع GNSS، قطع ارتباط ایستگاهها با سرور مرکزی، و اختلال در ارسال تصحیحات به کاربران. این بخش با هدف تضمین عملکرد صحیح سیستم و ارائه خدمات بهینه به کاربران فعالیت میکند.
کاربران سامانه شمیم
سامانه شمیم به سه دسته از کاربران خدمات ارائه میدهد. نخستین دسته شامل کارمندان سازمان اداره ثبت اسناد و املاک کشور است که برای دریافت حساب کاربری، باید معرفینامهای از سوی سازمان استان محل فعالیت خود ارائه نمایند. دسته دوم به افراد برونسازمانی اختصاص دارد، که نامهای آنها از طریق سازمان اداره ثبت اسناد و املاک استان به اداره کل کاداستر ارسال میشود تا در نظام جامع ثبتنام شوند.
دسته سوم شامل عموم افرادی است که در زمینه نقشهبرداری فعالیت میکنند. تنها کاربران دسته اول و دوم مجاز به انجام فعالیتهای مرتبط با کاداستر هستند و دادههای ارسالی از طریق حساب کاربری این افراد در سرور مرکزی ذخیرهسازی میشود، که امکان اعتبارسنجی برای آنها نیز فراهم است. کاربران دسته سوم میتوانند به صورت رایگان از خدمات تعیین موقعیت آنی سامانه شمیم در پروژههای نقشهبرداری خود بهرهمند شوند. این سامانه بهطور کلی به ارتقاء کیفیت خدمات در حوزه ثبت اسناد و نقشهبرداری کمک میکند و به کاربران امکان میدهد تا با دقت بیشتری به انجام امور خود بپردازند.
دقت قابل حصول با سامانه شمیم
دقت تعیین موقعیت با استفاده از سامانه شمیم به طور قابل توجهی به شرایط محیطی وابسته است. در غیاب تصحیحات ارائه شده توسط این سامانه، دقت موقعیتیابی گیرندههای GNSS میتواند بین 3 تا 30 متر متغیر باشد. این میزان دقت برای فعالیتهای دقیق نقشهبرداری، مانند کاداستر، مناسب نیست و بیشتر برای کاربردهای ناوبری کاربرد دارد.
با این حال، استفاده از تصحیحات سامانه شمیم امکان دستیابی به دقتی بین 1 تا 20 سانتیمتر در تعیین موقعیت آنی RTK را فراهم میآورد. این دقت میتواند در بسیاری از پروژههای نقشهبرداری بسیار مؤثر و کارآمد باشد. در تعیین موقعیت آنی RTK، فاصله گیرنده Rover از نزدیکترین ایستگاه مرجع تأثیر زیادی بر دقت دارد.
اگر از جدیدترین تکنولوژیهای GNSS برای ایستگاههای مرجع و گیرنده Rover بهرهبرداری شود، دقت قابل انتظار در سیستم RTK تحت شبکه میتواند تا 8 میلیمتر به علاوه 0.5 ppm باشد. در حال حاضر، برای سامانه شمیم دقتی برابر با 10 میلیمتر به علاوه 1 ppm در نظر گرفته شده است، به این معنا که دقت ثابت 10 میلیمتر و دقت متغیر 1 ppm را شامل میشود. این ویژگیها باعث میشوند که سامانه شمیم یک گزینه بسیار مناسب برای کارهای دقیق نقشهبرداری باشد.
دقت ثابت گیرنده مولتی فرکانس
دقت ثابت به معنای این است که در شرایط ایدهآل، حداکثر دقت سامانه به 10 میلیمتر میرسد. در عین حال، دقت متغیر 1ppm به این معناست که به ازای هر 1 کیلومتر فاصله Rover از نزدیکترین ایستگاه مرجع، دقت تعیین موقعیت به میزان 1 میلیمتر کمتر خواهد شد.
لازم به ذکر است که دقت اعلام شده در یک سیگما (1σ) با 67 درصد قابلیت اطمینان همراه است، در حالی که دقت دو سیگما (2σ) از قابلیت اطمینان 95 درصد برخوردار است. بنابراین، اگر گیرندهای در فاصله 35 کیلومتری از ایستگاه مرجع سامانه شمیم قرار گیرد، دقت یک سیگما تقریباً 4.5 سانتیمتر و دقت دو سیگما حدود 9 سانتیمتر پیشبینی میشود.
این دقت تنها در شرایط آسمان باز قابل دستیابی است و در شرایطی که دید محدود باشد، به دلیل عدم دسترسی به برخی ماهوارهها، دقت کمتری حاصل میشود. عواملی نظیر شرایط محیطی کاربر، اثرات مالتیپث، شرایط تروپسفر و یونسفر، تعداد ماهوارههای قابل ردیابی در ایستگاه مرجع و همچنین تکنولوژی گیرنده Rover میتوانند تأثیر زیادی بر کاهش دقت داشته باشند. در نتیجه، برای دستیابی به دقت مطلوب، لازم است تا شرایط محیطی و فنی به دقت مورد مطالعه و بررسی قرار گیرد.
خطای انسانی گیرنده مولتی فرکانس
در بررسی خطای انسانی در استفاده از گیرنده مولتی فرکانس شمیم، لازم است به عواملی همچون عدم تراز بودن و سانتراژ توجه ویژهای شود. به عنوان نمونه، اگر از یک ژالن 2 متری با دقت تراز 8 دقیقه استفاده شود، ممکن است خطای حدود 5 میلیمتر در موقعیت اندازهگیری ایجاد شود. با در نظر گرفتن این نکات، میتوان انتظار داشت که با اتصال به سامانه شمیم، دقت قابل دستیابی در سطح اطمینان 95 درصد، یعنی 2σ، در نقاط مختلف کشور بین 2 تا 10 سانتیمتر باشد.
این نکته حائز اهمیت است که تمامی محاسبات فوق بر اساس این فرض انجام میشود که تجهیزات Rover از جمله گیرنده، ژالن و تراز ژالن به درستی کالیبره شدهاند و هیچ خطای سیستماتیک وجود ندارد. علاوه بر این، در فرآیند نقشهبرداری، به ویژه در نقشهبرداری کاداستر، شناسایی دقیق نقاط رئوس قطعه زمین یا ملک با چالشهای متعددی همراه است. این مسائل به دقت و صحت دادهها در مراحل مختلف نقشهبرداری افزوده و اهمیت توجه به جزئیات را نمایان میسازد.
تراکم ایستگاههای مرجع سامانه شمیم
یکی از عوامل کلیدی در ایدهآل بودن یک شبکه GNSS، کیفیت تراکم ایستگاههای آن شبکه است. فاصله ایدهآل برای ایستگاهها در یک شبکه حدود 70 کیلومتر تعیین شده است. در بدترین سناریو، کاربر Rover میتواند حداکثر 35 کیلومتر از نزدیکترین ایستگاه فاصله داشته باشد. چنین شرایطی امکان دستیابی به دقتی بهتر از 10 سانتیمتر را در هر نقطه فراهم میآورد.

سامانه شمیم، به عنوان یک نوآوری در زمینه تعیین موقعیت و نقشهبرداری املاک در کشور، تحولی بزرگ ایجاد کرده است. با این حال، همانطور که در بخش 2-1 به آن اشاره شد، فاصله بین ایستگاههای این سامانه بین 60 تا 190 کیلومتر متغیر است و میانگین فاصله ایستگاهها حدود 125 کیلومتر برآورد میشود. این موضوع باعث میشود که بخشهای وسیعی از شهرها و اراضی کشاورزی تحت پوشش قرار نگیرند و در نتیجه، دقت مطلوبی (بهتر از 10 سانتیمتر) برای نقشهبرداری کاداستر حاصل نخواهد شد. این چالشها نشاندهنده ضرورت بهبود تراکم ایستگاهها و افزایش دقت در خدمات این سامانه است.
تصحیحات گیرنده مولتی فرکانس
در گیرندههای مولتیفرکانس که به سامانه شمیم متصل هستند، چندین پروتکل یا الگوریتم برای دریافت تصحیحات به کار گرفته میشود. انتخاب نوع پروتکلهای مختلف نقشهبرداری جهت دریافت این تصحیحات به ویژگیهای پروژه بستگی دارد. در این مقاله، به بررسی مفهوم و مقایسه تصحیحات VRS، MAX، FKP، iMAX و NEAREST در شبکههای GNSS شمیم خواهیم پرداخت.
این تصحیحات نقش مهمی در دقت و صحت دادههای دریافتی دارند و هر یک از این پروتکلها مزایا و معایب خاص خود را دارند که میتواند بر عملکرد نهایی سیستم تأثیر بگذارد. با تحلیل و مقایسه این تصحیحات، میتوانیم به انتخاب بهینهترین گزینه برای هر پروژه خاص دست یابیم و از حداکثر دقت ممکن بهرهمند شویم.
پروتکل VRS گیرنده مولتی فرکانس
ایستگاه مرجع مجازی VRS ایده ای است که توسط شرکت تریمبل معرفی شده و عملکرد آن بدین صورت است که یک ایستگاه پایه به طور مجازی در نزدیکی یک گیرنده Rover قرار میگیرد. این سیستم به کاهش خطاهای مرتبط با بیس لاین از جمله تغییرات غیرعادی در ترپوسفر، اختلالات یونسفر و خطاهای مداری کمک میکند. دادههای دریافتی از گیرنده Rover به سرور ارسال میشود و ایستگاه بیس مجازی با استفاده از نرمافزار شبکه و با توجه به مختصات Rover در لحظه اتصال به شبکه ایجاد میگردد. در صورتی که Rover از موقعیت اولیه دور شود، ایستگاه مجازی میتواند تغییر کند.
به این ترتیب، برای بهبود دقت بهتر است که Rover مجدداً به شبکه متصل شود تا یک ایستگاه مجازی جدید در نزدیکی خود ایجاد کند. برای ارسال موقعیت Rover، از فرمت استاندارد NMEA استفاده میشود. بیشتر گیرندههای Rover دادههای VRS را برای یک ایستگاه بیس که در فاصله چند متری قرار دارد، دریافت میکنند. سیستم VRS نیازمند ارتباط دوطرفه برای تأمین موقعیت دقیق Rover به نرمافزار شبکه میباشد. این ویژگیها باعث میشود که VRS یک گزینه کارآمد و دقیق برای تعیین موقعیت در شرایط مختلف باشد.
پروتکل MAX گیرنده مولتی فرکانس
در روش MAX -Master Auxiliary Correction Method، دادههای فشردهای از شبکه و خطاهای موجود در مشاهدات به دستگاه Rover ارسال میشود. این اطلاعات به Rover کمک میکند تا الگوریتمهای هوشمند و بهینهتری برای حل ابهامات فازها ایجاد کند و در نهایت به مختصات دقیقتری دست یابد. هر نرمافزار ایستگاه مرجع، الگوریتمها و مدلهای خاصی برای مدیریت این منابع خطا دارد و Rover میتواند بر اساس عملکرد الگوریتمهای خود، تصمیم بگیرد که آیا از اطلاعات شبکه RTK استفاده کند یا آنها را نادیده بگیرد.
برای رسانههای پخش، سلولهای از پیش تعیینشدهای وجود دارد که اپراتور شبکه میتواند آنها را به صورت دستی ایجاد کند. این سلولها میتوانند برای ارسال تصحیحات کمکی اصلی، که به نام Max شناخته میشوند، به Roverها استفاده شوند. کاربر Rover قادر است به سرویس تصحیحی متصل شود که برای موقعیت جغرافیایی او بهترین عملکرد را داشته باشد. با توجه به اندازه شبکه، میتوان چندین سلول تعریف کرد تا انتقال دادهها بهینه شده و تعداد ایستگاههای موجود در پیامهای تصحیح کاهش یابد.
پروتکل Auto-max گیرنده مولتی فرکانس
در زمینه ارتباطات دو طرفه، سیستم Leica GPS Spider بهطور خودکار مکانهای بهینهای را برای سلولهای مورد استفاده در تولید تصحیحات کمکی اصلی برای هر Rover انتخاب میکند. این خدمات تصحیح به نام Auto-max شناخته میشوند. با انتخاب تنظیمات مناسب سلولی، تصحیحات Auto-Max نیاز به پهنای باند برای ارسال تصحیحات را کاهش میدهد.
ایستگاه اصلی همواره به عنوان نزدیکترین ایستگاه به Rover انتخاب میشود و تصحیحات از ایستگاههای اطراف برای ارائه بهترین اطلاعات به موقعیت Rover انتخاب میگردند. با استفاده از Auto-max، حتی بزرگترین شبکههای مرجع میتوانند بهطور کامل از یک کانال ارتباطی یکپارچه بهرهمند شوند.
اطلاعات تصحیحات پروتکل MAX
تصحیحات Max شامل اطلاعات جامعی از سلولها هستند که به Rover این امکان را میدهند تا با حداکثر دقت و قابلیت اعتماد به کار خود ادامه دهد. با استفاده از Max، اپراتور شبکه میتواند تصحیحات را از طریق دو تکنیک ارتباطی، یعنی ارتباط دوطرفه و پخش، منتقل کند. به منظور پشتیبانی از گیرندههای قبلی مدل Rover که نمیتوانند پیامهای RTCM 3.0 شبکه RTK را دریافت کنند، سیستم Leica GPS Spider توانایی ایجاد تصحیحات Imax را دارد که به نام MAX شناخته میشود. این نوع تصحیحات Imax نیازمند ارتباط دوطرفه بوده و میتوانند در فرمتهای RTCM 2.3 و RTCM 3.0 منتقل شوند.
برخلاف سایر روشها، Imax به عنوان منبع تصحیح شبکه از یک دستگاه مرجع واقعی استفاده میکند، که این امر باعث افزایش هماهنگی و دقت در ردیابی تصحیحات دریافتی توسط Rover میشود. این ویژگی به کاربران اطمینان میدهد که اطلاعات دریافتی از دقت بالایی برخوردار است و میتواند به بهبود عملکرد Rover کمک کند.
پروتکل IMAX گیرنده مولتی فرکانس
نظریه IMAX Individual MAX که توسط شرکت Leica GeoSystem ارائه شده، به عنوان یک روش جدید در تصحیحات نرمافزاری شبکه شناخته میشود. در این روش، تصحیحات بر اساس مختصات ایستگاه متحرک (Rover) محاسبه میگردد. مشابه با سیستم VRS، در IMAX به جای محاسبه مشاهدات ایستگاه مرجع (Base Station) برای موقعیت خاص، اطلاعات اصلی مشاهدات به همراه تصحیحات محاسبه شده به کاربر ارسال میشود. در سیستم VRS، ممکن است خطاهای ناشی از یونوسفر در مشاهدات باقی بماند و ایستگاه متحرک بدون آگاهی از این خطاها از اطلاعات موجود استفاده کند. اما در IMAX، اطلاعات مربوط به موقعیت ایستگاه مرجع به Rover ارسال میشود. این روش ممکن است از تنظیمات و موقعیت ایستگاه متحرک بیشتر از حد لازم بهرهبرداری کند، زیرا نرمافزار شبکه میتواند بخشی از خطاهای مربوط به یونوسفر را کاهش دهد.
در مقایسه با VRS، IMAX به دلیل توجه به خطاهای وابسته به طول خط پایه در اطلاعات مشاهدات، گزینهای مناسبتر به شمار میآید. همچنین، IMAX مانند VRS نیاز به تبادل اطلاعات دوطرفه دارد که این امر از طریق اینترنت انجام میشود. در نهایت، در روش MAX، سرور مرکزی شمیم از مشاهدات هم زمان کلیه ایستگاه های مرجع موجود در شبکه شمیم جهت محاسبه تصحیحات ایستگاه متحرک یا گیرنده روور استفاده میکند. در حالی که در روشهای i-MAX و VRS، تنها مشاهدات نزدیکترین ایستگاه مرجع برای محاسبه تصحیحات ایستگاه سیار مورد استفاده قرار میگیرد. این تفاوتها در رویکردها، اهمیت انتخاب سیستم مناسب را در بهبود دقت و کارایی در اندازهگیریهای ژئودزی و ناوبری نشان میدهد.
پروتکل FKP گیرنده مولتی فرکانس
استفاده از روش FKP (Flächen-Korrektur-Parameter) به منظور انتقال مدل خطاهای وابسته به فاصله در سیستم Rover انجام میشود. در این روش، تصحیحات به صورت مجزا در Rover محاسبه میشود، که این امکان را فراهم میآورد تا Rover به طور مستقل تصحیحات خود را مشابه سیستم VRS انجام دهد یا از الگوریتمهای مختلف به نوبت بهرهبرداری کند. در مقایسه با روش VRS، در FKP اطلاعات بیشتری به Rover ارسال میشود، که نتیجه آن دریافت اطلاعات دقیقتر توسط Rover است. همچنین تصحیحات ایستگاه مرجع به همراه تصحیحات FKP برای محاسبههای مربوط به Rover مورد استفاده قرار میگیرد.
FKP به طور ساده به توصیف یک وابستگی خطی میان تصحیحات و موقعیت میپردازد. در واقع، این روش یک سطح شیبدار برای تصحیحات تعریف میکند و برای هر ماهواره و هر فرکانس به دو پارامتر (تمایل در شمال و جنوب، غرب و شرق) نیاز دارد. مدلهای FKP دارای نظم و ساختار بالایی هستند و میتوانند به طور مؤثری در کاهش خطاهای وابسته به موقعیت عمل کنند. با این حال، باید توجه داشت که اعتبار مدل FKP در شعاع 100 کیلومتر محدود است. این محدودیت ناشی از وجود منابع خطای فیزیکی است که میتوانند منجر به اثرات غیرخطی در فواصل طولانیتر شوند. در نتیجه، استفاده از این روش در فواصل نزدیکتر، دقت بهتری را ارائه میدهد.
پروتکل Nearest گیرنده مولتی فرکانس
در این وضعیت، سیستم به گونهای عمل میکند که شبیه به یک بیس و روور عمل کرده و به صورت ایستگاهی واحد SIGNAL فعالیت مینماید. در این حالت، دستگاه روور به نزدیکترین ایستگاه مرجع متصل میشود و تصحیحات مورد نیاز را از آن دریافت میکند.
پیشنهاد میشود در مواقعی که خارج از شبکههای موجود قرار دارید، از این روش استفاده کنید. این رویکرد میتواند به افزایش دقت و کارایی سیستم کمک کند و امکان بهرهبرداری از اطلاعات دقیقتر را فراهم آورد. استفاده از این روش در مواقع خاص، به ویژه در شرایطی که دسترسی به شبکه محدود است، میتواند راهحلی مؤثر محسوب شود.
اصطلاح NTRIP گیرنده مولتی فرکانس
برای دستیابی به دقت بالا در تعیین موقعیت با استفاده از RTK، نیاز است که از یک گیرنده Rover و یک گیرنده Base استفاده شود که تصحیحات را بهصورت لحظهای ارسال کند. این تصحیحات میتوانند از یک گیرنده Base که خود شما نصب کردهاید، یا از طریق یک گیرنده Base دوردست با استفاده از تکنولوژی NTRIP دریافت شوند.
NTRIP که مخفف Networked Transport of RTCM via Internet Protocol است، پروتکلی برای انتقال دادههای GPS تفاضلی (DGPS) به شمار میآید. این پروتکل به گیرندههای جیپیاس یا جیاناساس Rover امکان میدهد تا تصحیحات را از طریق اینترنت دریافت کنند، بدون اینکه نیازی به وجود یک ایستگاه Base محلی باشد. NTRIP بر پایه پروتکل HTTP/1.1 طراحی شده و برای انتقال دادههای GNSS توسعه یافته است.
این پروتکل شامل سه مولفه اصلی است: Base، Caster و گیرندههای Rover. بهطور معمول، ایستگاههای Base در این سیستم، ایستگاههای CORS هستند. دادههای جمعآوریشده توسط این ایستگاهها به Caster NTRIP ارسال میشود، جایی که این اطلاعات بهوسیله اینترنت به Roverهای متصل در پورتهای مشخص و مجاز منتقل میگردند. هنگام استفاده از NTRIP، شما میتوانید تمام تصحیحات تولیدشده را از طریق یک مودم سلولار (سیمکارت) موجود در گیرنده خود یا از طریق سیمکارتی که به کنترلر متصل است و از طریق بلوتوث به گیرنده جیپیاس یا جیاناساس شما متصل میشود، دریافت کنید. این فرآیند به شما این امکان را میدهد که در هر نقطهای از جهان با دقت بالا موقعیت خود را تعیین کنید.
روش استفاده از NTRIP گیرنده شمیم
برای بهرهبرداری از تصحیحات هر شبکه NTRIP، لازم است که ابتدا در سرویس NTRIP مورد نظر، یک حساب کاربری ایجاد نمایید. برای راهنمایی در خصوص ایجاد حساب کاربری در سامانههای شمیم پلاس، شمیم و سحاب، میتوانید به سامانه مربوطه مراجعه کنید. هر یک از این سامانهها آدرس IP و پورتی خاص برای اتصال و دریافت مجوز استفاده از شبکه ارائه میدهند. به منظور ورود به هر یک از شبکهها، به یک نام کاربری و رمز عبور نیاز خواهید داشت. این مراحل به شما این امکان را میدهد که به تصحیحات دقیق و بهروز دسترسی پیدا کنید و از خدمات شبکه NTRIP به بهترین نحو بهرهمند شوید.
مونت پوینت گیرنده مولتی فرکانس
پس از برقراری ارتباط دستگاه گیرنده GPS یا GNSS با شبکه NRTK، یک جدول به نمایش درمیآید که منابع تصحیحات موجود در سرور را نشان میدهد. این منابع تحت عنوان Mount Point شناخته میشوند. تصحیحات مورد نیاز برای تعیین موقعیت NRTK هر نقطه به روشهای مختلفی تولید میشود که در ادامه به بررسی آنها خواهیم پرداخت.
هر یک از این روشها در دستهای به نام Mount Point قرار میگیرد. با انتخاب Mount Point مورد نظر، کاربر در واقع مشخص میکند که تصحیحات ارائه شده برای سیگنال دریافتی با کدام الگوریتم محاسبه شده است. به عبارتی، Mount Point یا «نقطه اتصال» مشخصهای است که به وسیله آن، یک کاربر NTRIP به جریان دادهها در NTRIP Caster متصل میشود و بدین ترتیب میتواند از تصحیحات لازم برای بهبود دقت موقعیتیابی استفاده کند. این سیستم به کاربران این امکان را میدهد که با توجه به نیازهای خاص خود، تصحیحات بهینهتری را دریافت کنند و از دقت بالاتری در تعیین موقعیت برخوردار شوند.
انتریپ کستر گیرنده مولتی فرکانس
کستر NTRIP به عنوان یک سرور آنلاین عمل میکند که وظیفه آن انتقال دادههای تصحیحی تولیدشده توسط ایستگاههای مرجع به گیرندههای GPS یا GNSS در حالت rover است. این تصحیحات کمک میکنند تا سیگنالهای ارسالی از ماهوارهها بهطور دقیقتری تحلیل و اصلاح شوند. در مقالاتی که به مقایسه روشهای RTK کلاسیک و NRTK و ایستگاههای CORS پرداخته شده، توضیح داده شده است که در NRTK، تصحیحات موردنیاز برای تعیین موقعیت Rover با استفاده از یک مجموعه از ایستگاههای CORS و از طریق یک الگوریتم خاص تولید میشود.
این تصحیحات به تناسب نیازهای نقشهبردار در فرمتهای مختلف به گیرنده GPS یا GNSS ارسال میگردد. اما لازم است بدانیم که این الگوریتمها چه کاری انجام میدهند و در چه شرایطی استفاده از هر یک از آنها مناسبتر است. اگر تمایل دارید تا با انواع mount point های موجود در تعیین موقعیت NRTK آشنا شوید و بهترین الگوریتم برای پروژه خود را شناسایی کنید، ما شما را به ادامه مطلب دعوت میکنیم.
ارسال تصحیحات NRTK شمیم
Casterها معمولاً دادهها و تصحیحات را از طریق فرمتهای مختلفی نظیر RTCM 2.x، RTCM 3.x، CMR و CMR+ ارائه میدهند. کاربران قادرند با استفاده از مودمهای اینترنتی به Mount Pointهای مربوطه در بستر اینترنت و از طریق کستر NTRIP دسترسی پیدا کنند.
در پروتکل NTRIP، روشهای مختلفی برای انتقال دادهها وجود دارد که شامل Max، iMax، Nearest، VRS و همچنین چند نوع جریان محلی و اختصاصی مرتبط با NTRIP میباشد. این تنوع در روشهای انتقال داده، به کاربران این امکان را میدهد که با توجه به نیازهای خاص خود، بهترین گزینه را انتخاب کنند و از دقت بالاتری در اطلاعات دریافتی بهرهمند شوند. بهطور کلی، NTRIP به عنوان یک بستر کارآمد برای ارائه دادههای GNSS شناخته میشود که قابلیتهای متعددی را برای کاربران فراهم میآورد.
ایستگاه مرجع مجازی یا VRS شمیم
استفاده از NTRIP به ویژه زمانی که از الگوریتم ایستگاه مجازی یا VRS بهره میبرید، میتواند در دریافت تصحیحات اینترنتی بسیار مؤثر باشد. این الگوریتم به خصوص برای بیس لاینهای طولانی مورد استفاده قرار میگیرد. تراکم ایستگاههای CORS در یک شبکه ممکن است در محیطهای مختلف متفاوت باشد. اگرچه ممکن است تراکم ایستگاهها در شبکه شما مناسب باشد، اما اگر گیرنده GPS روور شما از ایستگاهها فاصله زیادی داشته باشد، الگوریتم VRS میتواند به شما در حذف اثرات بیس لاین کمک کند که خود میتواند منجر به بروز خطاهای قابل توجهی شود.
شبکه گیرندههای مرجع به یک مرکز محاسباتی متصل است و هر ایستگاه، حداقل سه ایستگاه، دادههای خام خود را برای ایجاد مدلهای خطا که شامل خطاهای اتمسفری و خطاهای ساعتی میشود، ارائه میدهد. این خطاها به فاصله و موقعیت ایستگاهها وابسته هستند. محاسبه این خطاها ابتدا با حل ابهامات فاز حامل آغاز میشود و نیاز به دانستن موقعیت دقیق ایستگاههای مرجع دارد. بعد از اینکه ابهامات فاز حل شد، فرآیند مدلسازی شروع خواهد شد. این فرآیند به دقت بیشتر در اندازهگیریها و کاهش خطاها کمک کرده و باعث افزایش کیفیت دادههای دریافتی میشود.
روش کار ایستگاه مرجع مجازی یا VRS
گیرنده روور GNSS یا GPS قادر است موقعیت تقریبی خود را محاسبه کرده و این اطلاعات را به کمک شبکههای GSM یا GPRS و با فرمت استاندارد NMEA به سرور محاسباتی منتقل کند. در این فرآیند، مرکز محاسبات بهطور آنی یک ایستگاه مرجع مجازی در نزدیکی موقعیت گیرنده روور ایجاد مینماید. ارتباط دوطرفهای بین گیرنده روور و مرکز پردازش وجود دارد، بهطوری که اگر فاصله میان ایستگاه مجازی و محل فعلی گیرنده روور از یک حد مشخص فراتر رود، ایستگاه مجازی جدیدی نزدیک به موقعیت کنونی روور ایجاد خواهد شد. این کار با ارسال دادههای شبه فاصله و اطلاعات فاز حامل از نزدیکترین ایستگاه مرجع به مکان ایستگاه مجازی صورت میگیرد و سپس خطاهای لازم از مدلهای خطای شبکه به آن افزوده میشود.
پس از این مراحل، دادههای تولیدشده VRS از طریق یک اتصال بیسیم و معمولاً با استفاده از پروتکل NTRIP به کاربر ارسال میگردد. این الگوریتم به گونهای عمل میکند که گویی دادههای VRS از یک ایستگاه مرجع فیزیکی دریافت شدهاند. گیرنده روور با استفاده از الگوریتمهای استاندارد تک بیس لاینی، مختصات خود را در حالتهای کینماتیک یا پسپردازش تعیین میکند. به این ترتیب، این سیستم به کسب اطلاعات دقیقتر و بهروزتر کمک میکند و در بهبود دقت موقعیتیابی نقش بسزایی دارد.
مواردی استفاده از الگوریتم VRS
در صورتی که در یک منطقه قرار دارید که فاصله گیرنده Rover شما با نزدیکترین ایستگاه CORS به 50 کیلومتر میرسد، این طول بیس لاین میتواند به خطاهای قابل توجهی در تعیین موقعیت RTK منجر شود. برای کاهش اثر این خطاها، راهکار مؤثری وجود دارد. هدف از ایجاد ایستگاه VRS، کاهش فاصله بیس لاین میان گیرنده GNSS روور و ایستگاه مرجع است. این کار به حذف مؤثر همبستگی خطاهای ناشی از فاصله کمک میکند و همچنین بر خطاهای تصحیحاتی که ممکن است از شبکه CORS ناشی شود، غلبه میکند.
با انتخاب الگوریتم VRS و ایجاد یک ایستگاه مجازی در نزدیکی موقعیت گیرنده روور، میتوان فاصله بیس لاین را به تقریباً صفر نزدیک کرد. این اقدام به شما کمک خواهد کرد تا در روند تعیین موقعیت نقاط، از خطاهای مرتبط با فاصله بیس لاین در امان بمانید و دقت بالاتری را در اندازهگیریهایتان تجربه کنید.
مزایا و معایب الگوریتم VRS
پروتکل RTCM 3.x قابلیت پشتیبانی از تصحیح VRS را دارد و این ویژگی در برخی پیامهای RTCM 2.x نیز موجود است. به همین خاطر، انواع مختلفی از گیرندههای GPS یا GNSS، از جمله گیرندههای تکفرکانسه، دوفرکانسه و مولتیفرکانس، قادرند با استفاده از این الگوریتم و فرمت NMEA به دادههای NRTK دسترسی پیدا کنند. در صورتی که موقعیت گیرنده روور تغییر کند، لازم است یک موقعیت جدید برای VRS تعیین شود. بنابراین، گیرنده روور باید دوباره روند مقداردهی اولیه را انجام دهد تا ابهام فاز جدید برطرف گردد.
VRS به عنوان یک سیستم ارتباطی دوطرفه، فقط در محیط NRTK و از طریق ارتباط NTRIP مورد استفاده قرار میگیرد. از این رو، وجود یک ارتباط اینترنتی قوی و پایدار همواره ضروری است. این ارتباطات به تبادل دادهها و اطلاعات دقیق در روند تعیین موقعیت کمک میکند و دقت و کیفیت نتایج را به طور قابلتوجهی افزایش میدهد. از آنجا که دقت در تعیین موقعیت یکی از ارکان اصلی کاربردهای GNSS است، توجه به این نکته اهمیت ویژهای دارد.
ایستگاه شبه مرجع یا PRS
ایستگاه شبه مرجع (PRS)، به عنوان یک نوع ایستگاه مجازی بهبود یافته، توسط شرکت Geo++ طراحی و در نرمافزار GNSMART بهرهبرداری میشود. این الگوریتم با استفاده از دادههای ایستگاههای مرجع و پارامترهای وضعیت، مشابه روش VRS، موقعیت کاربر را به نقطهای نزدیکتر تبدیل کرده و تصحیحات بهینهای بر اساس این مشاهدات برای گیرنده فراهم میآورد. در رویکرد PRS، ایستگاه مجازی در فاصلهای معین، به عنوان مثال 5 کیلومتر از موقعیت تقریبی کاربر، قرار میگیرد. این ترتیب به گونهای طراحی شده است که ایستگاه مرجع مجازی همواره در فاصلهای ثابت از موقعیت روور قرار داشته باشد. بدین ترتیب، تصحیحات شبکه RTK که برای موقعیت فعلی گیرنده محاسبه میشود، همواره خاص و منحصر به فرد است.
این ویژگی به کاهش خطاهای ناشی از فاصله افزایشیافته برای گیرندههای GPS یا GNSS متحرک کمک میکند و به کاربران این امکان را میدهد که در حین استفاده از این دستگاهها به راحتی حرکت کنند. در نهایت، این تکنیک به شکل قابل توجهی دقت و کارایی سیستمهای ناوبری را ارتقا میدهد و به کاربران اجازه میدهد بدون نگرانی از افزایش خطا، به آسانی در محیطهای گوناگون جابجا شوند. با توجه به این قابلیت، استفاده از PRS میتواند به بهبود تجربه کاربر و افزایش اعتماد به سیستمهای ناوبری مدرن کمک کند.
روش کار ایستگاه شبه مرجع یا PRS
در این روش، به جای تکیه بر موقعیتهای خاص هر کاربر، از موقعیتهای ثابت و از پیش تعیین شده گیرنده برای محاسبه دادههای تصحیح استفاده میشود. این رویکرد میتواند برای چندین موقعیت از پیش تعریف شده که در شبکهای منظم قرار دارند، به کار گرفته شود و معادل روش VRS محسوب میشود. در حقیقت، فرآیند تصحیح به شکلی مشابه با آنچه که در توضیحات مربوط به VRS ذکر شد، عمل میکند.
با این حال، روش PRS به دلایلی ممکن است به عنوان گزینهای بهتر نسبت به VRS انتخاب شود. یکی از دلایل اصلی این است که الگوریتم به کار رفته در PRS برای تولید تصحیحات RTK در گیرنده روور، به وجود خطاهای وابسته به فاصله توجه دارد و به همین دلیل قادر است خطاهای باقیمانده را مدلسازی کند. بر اساس تجربیات عملی، شاهد آن هستیم که عملکرد تعیین موقعیت در روش PRS به طور قابل توجهی بهتر از VRS است. همچنین، این روش امکان انجام حرکات در حین فرآیند تعیین موقعیت را فراهم میکند، چرا که تصحیحات OSR به طور خاص برای موقعیت روور بهینهسازی شدهاند. این ویژگیها باعث میشود که PRS بتواند در شرایط مختلف کارایی بهتری ارائه دهد و به عنوان یک گزینه مناسب در تعیین موقعیتهای دقیق مورد استفاده قرار گیرد.
روش مفهوم اصلی-کمکی یا MAX
تصحیحات در سیستم MAX یا (Master Auxiliary Correction) شامل اصلاحاتی است که به وسیله الگوریتم MAC ایجاد میشود. این تصحیحات به وسیله گیرندههای GNSS با استفاده از اطلاعات جامع شبکه انجام میپذیرد، اما تنها برای گیرندگانی که از پیامهای شبکه RTCM 3.1 پشتیبانی میکنند، قابل دریافت است. در این روش، اختلاف تصحیح فاز میان یک ایستگاه CORS اصلی و چندین ایستگاه CORS کمکی مورد استفاده قرار میگیرد. به طور کلی، گیرنده GPS یا GNSS موقعیت خود را به سرور مرکزی ارسال میکند و این سرور نزدیکترین ایستگاه موجود در شبکه را به عنوان ایستگاه اصلی CORS انتخاب مینماید.
این فرآیند به این معناست که در صورتی که یکی از ایستگاهها غیرفعال باشد، ایستگاه بعدی به کار گرفته میشود و در نتیجه ممکن است فاصله بیس لاین افزایش یابد.پس از تعیین ایستگاه اصلی، اختلافات مختصات و تصحیحات هندسی و یونوسفری بین ایستگاههای اصلی و کمکی به گیرنده GPS ارسال میشود. در نهایت، محاسبه و تنظیم دادههای تصحیح نهایی به طور منحصر به فرد در گیرنده روور انجام میگیرد که این فرآیند نیاز به نرمافزار و منابع پردازش اضافی دارد. معمولاً محدوده اعتبار نتایج به دست آمده از MAC بستگی به دامنه تحت پوشش ایستگاه اصلی و کلیه ایستگاههای کمکی دارد. این شیوه از خروجی ایستگاه اصلی بهره میبرد و اطلاعات مربوط به تغییرات مکانی تصحیحات را به آن اضافه میکند. MAC قادر است تغییرات مکانی را برای نقاط مختلف ارسال کند و به این ترتیب دقت و صحت اطلاعات دریافتی را بهبود بخشد.
مقایسه روش MAX و VRS/PRS
تمایز اصلی بین الگوریتمهای MAC و VRS/PRS در مکان محاسبه و اعمال تصحیحات موقعیتی نهفته است. در روش VRS/PRS، تصحیحات موقعیت کاربر در یک سرور مرکزی و با توجه به موقعیت نزدیک به گیرنده rover محاسبه میشود. این اطلاعات از سوی ارائهدهندگان تصحیحاتی ارائه میگردد. برعکس، در الگوریتم MAC، فرایند تصحیح باید توسط خود گیرنده rover انجام شود و نیازمند الگوریتمها و منابع خاصی است که در داخل گیرنده وجود دارد. در مورد MAC، به دلیل عدم وجود یک روش مشخص برای اعمال تصحیحات به موقعیت نهایی، این فرایند میتواند به شرکت تولیدکننده گیرنده وابسته باشد. در حالی که برای VRS/PRS، محاسبات همواره بر اساس فرمولهای یکسانی انجام میشود که برای تمامی گیرندههای GPS و GNSS قابل استفاده است.
از نظر نیاز به پهنای باند، MAC به دلیل انتقال دادههای چندین ایستگاه، به پهنای باند بیشتری نسبت به VRS/PRS احتیاج دارد. اما این روش با استفاده از الگوریتم MAC، در نظریه، افزونگی بیشتری را فراهم میکند. بهطور کلی، دقت حاصل از الگوریتمهای MAC و VRS باید مشابه باشد. روش VRS/PRS با استفاده از پروتکلهای RTCM2 و RTCM3 امکانپذیر است، در حالی که MAC تنها از پروتکل RTCM3 پشتیبانی میکند. این موضوع نشاندهنده تفاوتهای کلیدی در ساختار و عملکرد این دو الگوریتم است.
الگوریتم i-MAX تصحیحات شمیم
i-MAX تصحیحات فردی و کمکی به منظور پشتیبانی از گیرندههای GNSS قدیمیتر که قادر به دریافت و تفسیر پیامهای RTCM 3.1 نیستند، طراحی شده است. این تصحیحات به ارتباط دو طرفه بین گیرنده مرجع و گیرنده Rover نیاز دارند تا سرور شبکه بتواند مقادیر درست درونیابی تصحیحات را برای گیرنده روور محاسبه کند. درونیابی این تصحیحات بر اساس الگوریتمهای مشابه روش MAX انجام میشود. مراحل اصلی کار با i-MAX به نوعی شبیه به MAX است، با این تفاوت که سرور شبکه به طور مستقیم تصحیحات NRTK را برای گیرنده محاسبه کرده و آنها را در ایستگاه اصلی CORS پیادهسازی میکند. به وضوح، i-MAX عملکردی مشابه VRS دارد و به همین دلیل با چالشهای مشابهی که الگوریتم VRS با آنها مواجه است، روبرو خواهد شد.
i-MAX به طور مداوم از یک ایستگاه مرجع فیزیکی بهره میبرد و نه از ایستگاههای مجازی مانند VRS. این رویکرد باعث افزایش سازگاری و قابلیت ردیابی برای تصحیحات دریافتی توسط روور میشود. در صورتی که ایستگاههای مرجع بیش از 70 کیلومتر با هم فاصله داشته باشند، بیس لاینهایی به طول 40 کیلومتر یا بیشتر ایجاد خواهد شد که ممکن است برخی از گیرندههای GPS یا GNSS قدیمیتر نتوانند از طریق روش i-MAX به ابهام صحیح دست یابند.
الگوریتم NEAREST تصحیحات شمیم
این الگوریتم به طور معمول یکی از پرطرفدارترین روشها در میان کاربران سامانههای ارسال تصحیحات است. در این شیوه، گیرنده روور با ارسال موقعیت خود به Caster، به سرور این امکان را میدهد که نزدیکترین و بهترین گیرنده CORS را برای او انتخاب کند. به دلیل نزدیکی بین گیرندههای Base و Rover، تصحیحات اتمسفری مانند یونسفر و تروپسفر به سادگی قابل مدلسازی و تعدیل هستند و این باعث میشود که خطاهای مربوط به این تصحیحات برای هر دو گیرنده یکسان باشد. در نتیجه، بهترین تصحیحات ممکن برای گیرنده روور در این شرایط انتخاب میشود.
به طور کلی، فرض بر این است که این فرآیند به صورت دورهای نتایج ارسال شده را مورد ارزیابی مجدد قرار میدهد. این بدان معناست که کاربر در حال حرکت میتواند اطمینان حاصل کند که همواره بهترین دادهها و اتصالات را با توجه به تغییرات موقعیت خود دریافت میکند. با این حال، اگر در هنگام تعیین موقعیت، به هر دلیلی نزدیکترین گیرنده CORS در دسترس نباشد، سرور شبکه به طور خودکار نزدیکترین گیرنده CORS بعدی را برای ارسال تصحیحات به گیرنده روور انتخاب میکند. این سیستم به گونهای طراحی شده که همیشه بهترین عملکرد را برای کاربر تضمین کند و به او این اطمینان را میدهد که دادههای دقیق و کارآمدی را دریافت خواهد کرد.
مفهوم GG-GGB-GGBG تصحیحات شمیم
جهت افزایش دقت در تعیین موقعیت یک نقطه با استفاده از سامانههای NRTK، از الگوریتم تفاضلی DGNSS بهرهبرداری میشود که بین دو یا چند ایستگاه برقرار میگردد. برای عملکرد صحیح این الگوریتم، لازم است که گیرنده بیس و گیرنده روور بهصورت همزمان تعدادی از ماهوارههای GNSS را رصد کنند. همانطور که در مقاله معرفی سامانه GNSS بیان شده است، ماهوارههای این سامانه به چهار دسته GPS، GLONASS، GALILEO و BeiDou تقسیمبندی میشوند. در فرآیند تولید تصحیحات، با انتخاب پسوندهای -GG، -GGB، و -GGBG، شما تعیین میکنید که اطلاعات دریافتی از کدامیک از این سیستمها برای تصحیح موقعیت استفاده خواهد شد.
پسوند -GG بهاینمعناست که فقط از ماهوارههای گلوناس و جیپیاس برای تولید تصحیحات استفاده میشود. در مقابل، پسوند -GGB بهکارگیری جیپیاس، گلوناس و بیدو برای تولید تصحیحات RTK اشاره دارد. همچنین، پسوند -GGBG به این معناست که از تصحیحات بهدستآمده از تمامی چهار سامانه GPS، GLONASS، GALILEO و BeiDou استفاده میشود تا خطاها شناسایی و موقعیت محاسبهشده بهدرستی تصحیح گردد. با این روش، دقت و اعتبار دادههای موقعیتی بهطور قابل توجهی افزایش مییابد.
روش کار الگوریتم های گیرنده شمیم
الگوریتم NEAREST برای تصحیح و اصلاح خطاهای مرتبط با تعیین موقعیت، به نزدیکترین ایستگاه مرجع در شبکه متکی است. این الگوریتم بر اساس اطلاعات موقعیتی که از گیرنده جیپیاس Rover دریافت میشود، نزدیکترین ایستگاه مرجع را شناسایی کرده و تصحیحات مورد نیاز را از آن دریافت میکند. از سوی دیگر، الگوریتمهای MAX و iMAX نیز برای ارائه تصحیحات از شبکهای متشکل از ایستگاههای مرجع و موقعیت ابتدایی تولید شده توسط گیرنده Rover استفاده میکنند. در الگوریتم MAX، تمامی دادهها به گیرنده Rover ارسال میشود و تصحیحات مستقیماً در خود این گیرنده اعمال میگردند. در مقابل، در الگوریتم iMAX، تصحیحات در سرور شبکه انجام میشوند و به موقعیتها در ایستگاه مرجع اصلی اعمال میگردند.
همچنین، الگوریتم VRS برای عملکرد صحیح به طول و عرض جغرافیایی که از سمت گیرنده Rover ارسال میشود، نیاز دارد. این الگوریتم با استفاده از این اطلاعات، یک ایستگاه مجازی نزدیک به گیرنده جیپیاس یا جیاناساس ایجاد میکند و از آن برای اعمال تصحیحات بهره میبرد. در نتیجه، هر یک از این الگوریتمها با رویکردهای متفاوت خود، به بهبود دقت تعیین موقعیت کمک میکنند.
روش ایستگاه مرجع مجازی VRS
در روش VRS، که یکی از الگوریتمهای پرکاربرد در سیستمهای RTK به شمار میآید، یک ایستگاه مرجع مجازی در نزدیکی محل گیرنده Rover توسط مرکز پردازش ایجاد میشود تا تصحیحات مشاهدات را محاسبه کند. هدف اصلی این روش کاهش فاصله میان ایستگاه مرجع و گیرنده Rover است تا تأثیر خطاهای مداری ماهوارهها و تأخیرات جوی کاهش یابد و دقت تعیین موقعیت گیرنده افزایش یابد. این فرآیند به این صورت انجام میشود که مشاهدات شبه فاصله و فاز موج حامل حداقل سه ایستگاه دائمی مرجع CORS که در نزدیکی Rover قرار دارند، به طور مداوم توسط مرکز پردازش جمعآوری و پردازش میشود. برای تعیین موقعیت ایستگاه مرجع مجازی، یک ارتباط دوسویه بین گیرنده Rover و مرکز پردازش برقرار میگردد.
در این مرحله، کاربر مختصات تقریبی خود را از طریق فرمت NMEA به مرکز پردازش ارسال میکند. این مختصات ابتدایی با دریافت اولین تصحیحات بهبود یافته و دوباره به مرکز پردازش ارسال میشود. به این ترتیب، مرکز پردازش بر اساس موقعیت تقریبی ایستگاه مرجع مجازی VRS را ایجاد کرده و با استفاده از مشاهدات ایستگاههای دائمی مرجع، تصحیحات و مشاهدات GNSS را از طریق روشهای درونیابی خطی، غیرخطی یا برازش صفحهای محاسبه میکند. پس از مشخص شدن موقعیت ایستگاه مرجع مجازی، تصحیحات به فرمت RTCM از طریق پروتکل NTRIP به گیرنده Rover ارسال میشود و در نتیجه موقعیت این گیرنده با دقتی در حد سانتیمتر تعیین میگردد. این روش به طور قابل توجهی دقت و کارایی سیستمهای موقعیتیابی را افزایش میدهد و به کاربران امکان میدهد تا با اطمینان بیشتری در فعالیتهای خود از این تکنولوژی بهرهمند شوند.
ویژگیهای الگوریتم VRS
برای ارسال تصحیحات VRS، از فرمت RTCM 3.x بهرهبرداری میشود و همچنین میتوان از فرمت RTCM 2.x (پیامهای نوع 18 و 19 یا 20 و 21) نیز استفاده کرد. با استفاده از روش VRS، گیرندههای تک فرکانسه و چندفرکانسه قادرند از سیستم RTK تحت شبکه بهرهبرداری کنند و موقعیت تقریبی خود را از طریق فرمت NMEA ارسال نمایند. به منظور برقراری ارتباط مؤثر، باید ارتباطی دو طرفه بین گیرنده Rover و مرکز پردازش برقرار شود تا گیرنده Rover توانایی ارسال مختصات تقریبی خود را داشته باشد. این ارتباط دو طرفه میتواند تعداد کاربرانی را که به تصحیحات مرکز پردازش دسترسی دارند، محدود کند.
برای استفاده از الگوریتم VRS، نیاز است که دسترسی به اینترنت یا لینک GSM وجود داشته باشد، زیرا در این حالت امکان استفاده از لینک رادیویی برای ارسال اطلاعات بین مرکز پردازش و گیرنده Rover وجود ندارد. در صورتی که فاصله بین گیرنده Rover و ایستگاه مجازی به حد مشخصی افزایش یابد، یک ایستگاه مجازی جدید در نزدیکی محل فعلی گیرنده Rover تعیین و مورد استفاده قرار میگیرد. در این شرایط، برای رفع ابهام فاز، راهاندازی اولیه گیرنده Rover باید مجدداً انجام شود تا تصحیحات به درستی دریافت و اعمال گردند.
برای محاسبه تصحیحات مربوط به هر گیرنده Rover، معمولاً از سه ایستگاه مرجع استفاده میشود. این محدودیت در تعداد ایستگاهها میتواند توانایی سیستم را در سازگاری با شرایط جوی محیطی کاهش دهد. همچنین، در صورت عدم دریافت اطلاعات از هر یک از این سه ایستگاه مرجع، باید ایستگاه جایگزینی انتخاب و محاسبات دوباره انجام شود که این امر ممکن است منجر به تأخیر در ارسال تصحیحات گردد.
روش مفهوم اصلی-کمکی MAC
این روش پس از VRS به وجود آمده و شامل یک ایستگاه اصلی و تعدادی ایستگاه دائمی مرجع به نام CORS میباشد. به منظور کاهش حجم اطلاعات ارسالی در شبکه، تمامی تصحیحات و اطلاعات موقعیتی تنها توسط یک ایستگاه مرجع که ایستگاه اصلی نامیده میشود، ارسال میگردد. سایر ایستگاههای CORS به عنوان ایستگاههای کمکی عمل کرده و اختلاف تصحیحات و موقعیتهای آنها نسبت به ایستگاه اصلی محاسبه میشود. لازم به ذکر است که ایستگاه اصلی لزوماً نزدیکترین ایستگاه به گیرنده Rover نیست و در صورت عدم دسترسی به اطلاعات این ایستگاه، یکی از ایستگاههای کمکی به عنوان ایستگاه اصلی انتخاب خواهد شد.
در روش MAC، طراحی شبکه بر اساس خوشهها و سلولها صورت میگیرد. هر شبکه متشکل از چند خوشه است که ممکن است بر یکدیگر همپوشانی داشته باشند. به بیان دیگر، هر خوشه یک زیرمجموعه از ایستگاههای دائمی مرجع است که به گونهای انتخاب میشود که با استفاده از روش تفاضلی دوگانه، ابهام فاز موجود را از بین ببرد. هر سلول حداقل شامل سه ایستگاه در یک خوشه و یک ایستگاه اصلی است که به همکاری و تبادل اطلاعات بین ایستگاهها کمک میکند. این طراحی موجب بهبود دقت و کارایی سیستمهای ناوبری میگردد.
ویژگیهای الگوریتم MAC
در روش MAC، محاسبات صورتگرفته در مرکز پردازش به مراتب کمتر از روش VRS است. در این روش، مرکز پردازش به انجام برآوردهایی از ابهام فاز و خطای ساعت میپردازد و بخش عمده محاسبات در گیرندهای به نام Rover انجام میشود. گیرنده Rover با بهرهگیری از تمامی اطلاعات موجود، تصحیحات شبکه را به صورت درونیابی دریافت میکند. در سیستم MAC، به واسطه استفاده از اینترنت، هیچ محدودیتی برای تعداد کاربران وجود ندارد. هر کاربر به هنگام استفاده از گیرنده Rover میتواند از نزدیکترین سلول برای دریافت تصحیحات بهرهبرداری کند. MAX به معنای تصحیحات شبکهای MAC است.
در روش Broadcast-MAX، از لینکهای رادیویی و سلولهای از پیش تعیینشده توسط مرکز پردازش استفاده میشود. در این حالت، کاربر با استفاده از نزدیکترین سلول به موقعیت خود، تصحیحات را دریافت میکند. از سوی دیگر، در روش Auto-MAX، کاربر موقعیت تقریبی خود را از طریق فرمت NMEA به مرکز پردازش ارسال میکند. این اقدام به برقراری یک ارتباط دوطرفه منجر میشود که در آن نزدیکترین ایستگاه به گیرنده Rover به عنوان ایستگاه اصلی انتخاب میشود. همچنین، برای انتخاب بهترین سلول، میتوان از سلولهای از پیش تعیینشده بهرهبرد و با توجه به حرکت مداوم گیرنده Rover، این انتخاب بهروز شود.
روش کار الگوریتم MAC
برای گیرندههایی که توانایی دریافت تصحیحات به فرمت RTCM 3.0 را ندارند، روش i-MAX توسعه یافته است. i-MAX یکی از روشهای رایج در سیستمهای RTK تحت شبکه به شمار میرود. تفاوت اصلی این روش با MAX در این است که در i-MAX، مرکز پردازش علاوه بر تخمین ابهام فاز، تصحیحات شبکه را نیز محاسبه کرده و این تصحیحات را به مشاهدات ایستگاه اصلی اضافه میکند.
در حالی که در روش MAX، محاسبات عمدتاً در گیرنده Rover انجام میشود، فرآیند i-MAX مشابه VRS است، با این تفاوت که در اینجا از ایستگاه مجازی استفاده نمیشود و امکان پیگیری و ردیابی تصحیحات دریافتی توسط Rover فراهم است. این روش ارتباطی دو طرفه بین گیرنده Rover و مرکز پردازش برقرار میکند، به طوری که گیرنده Rover میتواند مختصات تقریبی خود را از طریق فرمت NMEA ارسال کند و سپس مشاهدات و تصحیحات مورد نیاز را از مرکز پردازش دریافت نماید. در این الگوریتم، ارسال تصحیحات همچنین میتواند با استفاده از فرمت RTCM 2.x انجام گیرد. این ویژگیها موجب میشود که i-MAX به عنوان یک راه حل کاربردی و موثر در حوزه تصحیحات شبکهای شناخته شود.
پرسش و پاسخ گیرنده مولتی فرکانس
گیرندههای مولتیفرکانس ابزارهایی هستند که برای دریافت تصحیحات سامانه شمیم طراحی شدهاند. نحوه دریافت این تصحیحات بستگی به نوع پروژه و فاصله از ایستگاههای مرجع سامانه شمیم دارد و میتواند متفاوت باشد. به منظور کمک به کاربران سامانه شمیم، در اینجا به برخی از سوالات رایج پاسخ دادهایم تا ابهامات موجود برطرف شود.
لازم به ذکر است که گیرنده مولتیفرکانس روور جزء ضروری و مکمل سامانه شمیم به شمار میآید و نقش حیاتی در بهبود دقت و کیفیت دادهها ایفا میکند. از این رو، آشنایی با ویژگیها و کارکردهای این گیرندهها برای کاربران اهمیت ویژهای دارد.
پروتکل Mount Point گیرنده شمیم
در انتخاب پروتکل مناسب برای بخش Mount Point، توجه به نکات زیر اهمیت دارد. زمانی که فاصله بین گیرنده Rover و نزدیکترین ایستگاه شمیم کمتر از 20 کیلومتر باشد، کاربرد روش Nearest-GGBG مناسبتر است. در مواقعی که این فاصله بیش از 30 کیلومتر است، توصیه میشود از پروتکلهای VRS-GGBG یا iMAX-GGBG استفاده گردد.
اگر تعداد ماهوارههای مورد استفاده تقریباً برابر با تعداد ماهوارههای رصد شده در زمان دریافت تصحیحات شمیم باشد، انتخاب پروتکلهای iMAX-GGBG یا VRS-GGBG گزینه بهتری خواهد بود. در غیر این صورت، پیشنهاد میشود از روش Nearest-GGBG بهرهبرداری شود. با رعایت این نکات فنی، میتوان به دقت بیشتری در فرآیند دریافت تصحیحات شمیم رسید و در نتیجه عملکرد سیستم شمیم را ارتقا داد.
عدم اتصال گیرنده به سامانه شمیم
دلایل عدم اتصال به سامانه شمیم در نرمافزار میتواند به چند عامل بستگی داشته باشد. عدم اتصال به این سامانه به معنای عدم سبز شدن آیکون موقعیت در بالای صفحه و قرمز بودن آن است. در صورتی که چراغ ماهواره بر روی گیرنده به رنگ آبی باشد، چهار دلیل اصلی برای این وضعیت وجود دارد:
اولین دلیل میتواند عدم دسترسی به اینترنت باشد که مانع از برقراری ارتباط با سامانه میشود. دومین دلیل، ممکن است مربوط به اشغال بودن کد کاربری و رمز عبور شمیم باشد. در برخی موارد، کاربران ممکن است از کد کاربری شخص دیگری استفاده کنند و در صورت استفاده همزمان دیگران از آن کد، امکان اتصال برای کاربر وجود نخواهد داشت.
سومین دلیل عدم تعیین پروتکل مناسب در بخش Mount Point است که در صورت نادرست بودن تنظیمات، اتصال به سامانه ممکن نخواهد بود. اگر کاربر از صحت این سه مورد اطمینان دارد و هنوز هم با مشکل مواجه است، ممکن است اختلالاتی در خود سامانه شمیم وجود داشته باشد یا اینکه این سامانه به طور کلی قطع شده است. شایان ذکر است که اگر چراغ ماهواره روی گیرنده به رنگ قرمز باشد، این نشاندهنده عدم توانایی گیرنده در دریافت سیگنالهای ماهوارهای است.
بررسی سامانه شمیم قبل از نقشه برداری
برای آگاهی از وضعیت پوشش و دقت قابل دستیابی از سامانه شمیم قبل از مراجعه به محل پروژه نقشهبرداری، میتوان به وبسایت رسمی سامانه به نشانی shamim.ssaa.ir/sbc مراجعه کرد. در بخش وضعیت سایت، اطلاعات مربوط به موقعیت ایستگاههای دائمی شمیم در قالب فایل kml قابل دانلود است. با دریافت این فایل و بازکردن آن در نرمافزار Google Earth، میتوان فاصله بین محدوده نقشهبرداری و نزدیکترین ایستگاههای سامانه را بررسی کرد. میزان دقت مسطحاتی و ارتفاعی که قابل دستیابی است، به فاصله از نزدیکترین ایستگاه بستگی دارد.
در شرایط ایدهآل، دقت RTK میتواند بر اساس روابط زیر محاسبه شود. اگر تصحیحات از نزدیکترین ایستگاه (Nearest) دریافت شود، دقت به ازای هر یک کیلومتر فاصله از ایستگاه مرجع، یک میلیمتر (1 ppm) خواهد بود. به عنوان مثال، اگر فاصله محل کار از نزدیکترین ایستگاه 30 کیلومتر باشد، دقت قابل دستیابی بر اساس این فرمول مشخص میشود. همچنین در صورتی که به شبکه تصحیحات متصل شوید، مانند VRS یا i-MAX، مقدار ppm بر اساس فاصله واقعی از نزدیکترین ایستگاه محاسبه میگردد. این نکته حائز اهمیت است که دقت و کیفیت اطلاعات دریافتی به میزان نزدیکی به ایستگاههای مرجع بستگی دارد و این موضوع میتواند تاثیر قابل توجهی بر نتایج نهایی نقشهبرداری داشته باشد.
بررسی قطع یا وصل بودن سامانه شمیم
برای آگاهی از وضعیت فعال بودن ایستگاههای سامانه شمیم قبل از مراجعه به محل پروژه نقشهبرداری، میتوانید به وبسایت این سامانه به نشانی shamim.ssaa.ir/sbc مراجعه کنید. در این سایت، با استفاده از بخش “وضعیت سایت”، قادر خواهید بود با کلیک بر روی ایستگاههای مدنظر، از عملکرد آنها مطلع شوید.
رنگ سبز به این معنی است که ایستگاه مربوطه به درستی تصحیحات را به سرور ارسال کرده و ارتباط شبکهای آن با سرور سامانه شمیم برقرار است. در صورتی که رنگ آبی نمایش داده شود، به این معناست که ایستگاه آماده ارسال تصحیحات است، اما ارتباط شبکهای آن با سرور دچار اختلال شده است. همچنین، رنگ قرمز نشاندهنده بروز مشکل در ایستگاه شمیم است و به این ترتیب، امکان ارسال تصحیحات به سرور وجود ندارد. این اطلاعات به شما کمک میکند تا قبل از حضور در محل، از وضعیت ایستگاهها مطلع شوید و برنامهریزی بهتری برای پروژه خود داشته باشید.

3 دیدگاه. ارسال دیدگاه جدید
ممنون بابت اطلاعات مفید جی پی اس شمیم
سلام وقت شما بخیر، برای هر میزان مساحت می توانید سند دریافت کنید.
سلام شماره ورود به سامانه و ملی رو ایمیل بفرمایید بررسی می کنیم